



CAN
W połowie lat 90. ubiegłego wieku rozpoczęto łączenie siecią transmisji danych sterowanych elektronicznie układów i zespołów samochodów osobowych. Rosnąca liczba sterowników, w które zaczęto wyposażać pojazdy samochodowe, zwłaszcza w zakresie bezpieczeństwa i komfortu jazdy, wielokrotnie zwiększyła liczbę przewodów i połączeń pokładowej instalacji elektrycznej. W celu ograniczenia masy i kosztów przewodów miedzianych wprowadzono najpierw magistralę CAN (ang. Controller Area Network), aby wyeliminować znaczną część kabli. Początkowo magistrali CAN użyto do transmisji danych między trzema lub czterema sterownikami najważniejszych układów i zespołów samochodu. Liczba sterowników połączonych pokładową siecią transmisji danych szybko rosła. Obecnie w samochodzie średniej klasy jest ich od 30 do 50, a w pojeździe klasy wyższej – nawet 100.
LIN, MOST, FlexRay Przy dużej liczbie sterowników występujących w pojeżdzie połączenie ich jednym wspólnym systemem transmisji nie jest optymalne. Należy zróżnicować systemy sieci połączeń. Z reguły są to wyodrębnione rodzaje magistrali CAN działające niezależnie jako samodzielne systemy. W celu lokalnego rozszerzenia magistrali CAN oraz redukcji kosztów opracowano magistralę LIN (ang. Local Interconnect Network) będącą podsystemem podpo- rządkowanym magistrali CAN. Ostatnie lata w pojazdach samochodowych charakteryzuje dynamiczny rozwój układów bezpieczeństwa i komfortu jazdy oraz informacji i mediów (ang. infotainment information and entertainment). Są to przede wszystkim układy bezpieczeństwa czynnego, które zmniejszają ryzyko kolizji lub znacznie ograniczają jej skutki (ang. pre-safe systems) oraz układy nawigacji, telefonii komórkowej i odtwarzania plików
wideo, które wymagają coraz szybszej transmisji danych. Magistrala MOST (ang. Media Oriented Systems Transport) umożliwia pasażerom pojazdu oglądanie filmów, zapewniając płynny i niezakłócony odbiór. Natomiast magistrala FlexRay, będąca systemem magistrali szeregowej, deterministycznej i odpornej na uszkodzenia, jest instalowa- na przede wszystkim w układach bezpie- czeństwa. Sieć FlexRay opracowano rów- nież z myślą o jeszcze większym ograniczeniu liczby podzespołów mechanicznych w pojazdach. Dzięki wykorzystaniu FlexRay już obecnie wytwarza się samochody, w których układy kierowniczy i hamulcowy są wyłącznie elektryczne. Niestety uszkodzenia magistral nie zawsze występują w łatwych do wykrycia i usunięcia miejscach. Dlatego kładziemy szczególny nacisk dobra diagnostykę i wskazanie miejsca uszkodzenia niewymagających zupełnego demontażu samochodu.
Komunikacja bezprzewodowa we współczesnych pojazdach dynamicznie rozwijają się również systemy bezprzewodowe. Od dawna działa już radio CB, podobnie jest z telefonami, systemami informacji ratunkowej, kontrolą ciśnienia w oponach, radarową regulacją odstępu w kolumnie pojazdów i wieloma innymi układami, których ciągle przybywa. Najnowsze pojazdy są już doskonale wyposażone w oprogramowanie sieci bezprzewodowych (ang. connected car), że warsztat samochodowy błędów moc wykonać wstępna diagnostykę problemu i moc przygotować wszystkie niezbędne do obsługi samochodu części zamienne, zanim jeszcze użytkownik przyjedzie do warsztatu.
Technologia nadal się rozwija.
Diagnostyka sieci Linii K, Lin ,CAN, TTCAN, FlexRay, TTP, Bluetooth oraz MOST
Diagnozowanie samochodów – sieć CAN

Snap-on Equipment and Diagnostics
Technika i technologia stosowana w samochodach w bardzo szybkim tempie się zmieniają, a co za tym idzie – muszą zmieniać się również narzędzia stosowane przez serwisy samochodowe. Konieczne jest również stałe poszerzanie wiedzy mechaników. W starszych samochodach większość napraw stanowiły naprawy mechaniczne, natomiast obecnie większość problemów, z jakimi spotykają się warsztaty, to usterki elektryczne czy wręcz elektroniczne.
Dawniej nie było sterowników, samochody miały gaźniki czy pompy mechaniczne. W późniejszych czasach pojawiło się sterowanie elektroniczne pracą silnika, systemem hamulcowym itd., wówczas powstała specjalizacja – elektronik samochodowy. Rozwój techniki, pojawienie się samochodów hybrydowych czy elektrycznych również wymusza zmianę podejścia do napraw samochodów.
Nie jest to kwestia przyszłości, samochody już od lat mają sterowniki i łączącą je sieć informacyjną. Pierwszym samochodem, który był wyposażony w magistralę przesyłu danych między sterownikami, było BMW 8 z 1988 roku, natomiast pierwszym samochodem z siecią CAN był Mercedes S z 1991 roku, a więc samochody sprzed prawie 30 lat. Obecnie w samochodach jest kilkadziesiąt sterowników, które komunikują się ze sobą i korzystają z sygnałów z tych samych czujników. Aby było to możliwe i aby zmniejszyć liczbę przewodów elektrycznych, zastosowano sieć CAN, która może występować w kilku wariantach: najczęściej jest to para splecionych przewodów, natomiast może być to również pojedynczy przewód czy – w nowszych rozwiązaniach – światłowód MOST.

© Snap-on Equipment and Diagnostics
Sygnał sieci CAN został przedstawiony na ilustracji 1. Ponieważ jest to sygnał cyfrowy, przesyłane są tylko dwa stany: „0” oraz „1”. Na ilustracji 2 przedstawiono, jak rozróżnia to sterownik. Dzięki temu zakłócenia w postaci skoków napięcia nie wpływają na przesyłane informacje, ponieważ sterownik ECU „patrzy” na 2 V różnicy pomiędzy sygnałami. Wyjaśnione jest to na ilustracji 3.

© Snap-on Equipment and Diagnostics
Sterowniki wymagają różnej prędkości przesyłu danych, dlatego stosuje się kilka kategorii sieci o różnej częstotliwości oraz różnych priorytetach. Przykładowy schemat sieci CAN przedstawiono na ilustracji 4.
W samochodzie stosowane są sieci o różnych prędkościach przesyłu danych. Aby mogły one ze sobą współpracować, stosowane są sterowniki łączące te sieci, nazywane bramami.
Spójrzmy teraz z punktu widzenia serwisu, jakie są konsekwencje stosowania sieci, jeżeli chodzi o diagnozowanie występowania problemów:
- błędny sygnał z jednego czujnika może spowodować nieprawidłowe działanie kilku różnych systemów,
- kod błędu dotyczący danego podzespołu może być zapisany przez sterownik innego systemu,
- błędy sieci mogą uniemożliwiać diagnozowanie danych systemów za pomocą testerów diagnostycznych,
- dane systemy mogą funkcjonować pomimo uszkodzonej komunikacji poprzez sieć.
Budowa i diagnozowanie sieci
Sieć na swoich końcach jest zabezpieczona 2 opornikami o oporności po 120 omów. Zabezpieczają one przed odbijaniem się sygnałów i ich interferencją. Schemat sieci CAN i połączenia do niej poszczególnych odbiorników przedstawiony jest na ilustracji
5.Podstawowe sprawdzenie można wykonać, podłączając się multimetrem pod gniazdo diagnostyczne (piny odpowiadające za sieć CAN to zazwyczaj piny o numerach 6 i 14). Na wyłączonym zapłonie oporność powinna wynosić 60 Ω. Należy pamiętać, aby pomiar przeprowadzić na wyłączonym zapłonie, kiedy sterowniki nie przesyłają sygnału!
Możliwości uszkodzenia sieci CAN i ich diagnozowanie
W przypadku zwarcia sieci nie ma komunikacji, natomiast poszczególne sterowniki mogą funkcjonować poprawnie. Oporność zmierzona multimetrem będzie wynosiła 0 Ω. W przypadku przerwy w sieci (urwany przewód) poszczególne sterowniki mogą działać, natomiast w pamięci błędów zapisany będzie błąd komunikacji. Zmierzona oporność będzie wynosić 120 Ω. W przypadku przerwy między sterownikiem a siecią dany sterownik nie będzie działał, natomiast pozostałe – tak. Zmierzona oporność będzie wynosiła 60 Ω, a odczytany kod błędu wskaże na sterownik, który ma kłopoty z komunikacją.
Do sprawdzenia sygnału przesyłanego przez sieć potrzebujemy już oscyloskopu, gdyż prędkość przesyłu danych, a co za tym idzie – częstotliwość sygnału, jest bardzo wysoka:
- CAN do 1 Mbit/s,
- Flexray do 10 Mbit/s,
- MOST Fibre Optic do 150 Mbit/s.
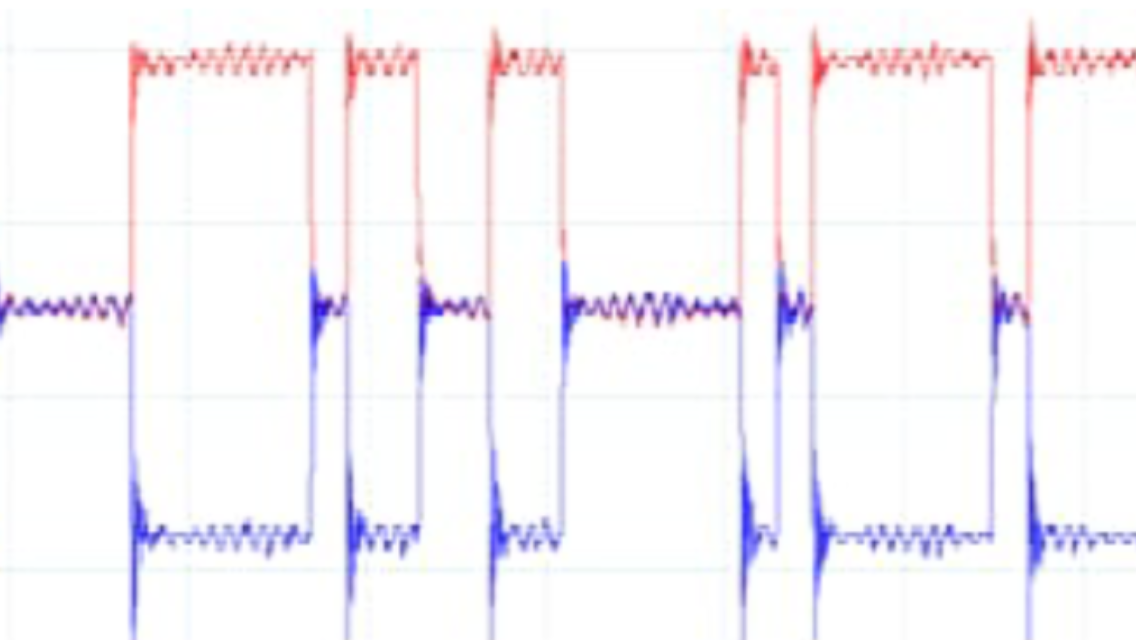
Na ilustracji 9 przedstawiono przykład nieprawidłowego przebiegu sygnału z sieci CAN – w tym przypadku linia CAN Low jest zwarta do masy.
Ponieważ poszczególne sterowniki komunikują się w sieci, powstał problem ich odpowiedniego skonfigurowania, aby prawidłowo mogły przesyłać informacje między sobą. Pojawił się również problem z podłączaniem do samochodu dodatkowych akcesoriów, np. nieoryginalnego radia, reflektorów przeciwmgielnych czy haka holowniczego. Na ilustracji 10 przedstawiono przykład przebiegu sygnału z sieci, w której nie zostały prawidłowo skonfigurowane sterowniki.
Kwestia samych przewodów
Należy zwrócić również uwagę na stan kabli magistrali CAN. Przy naprawie przewodów sieci CAN należy stosować się do następujących wytycznych:
- skrętka może być rozprostowana maksymalnie na długości 50 mm,
- odległość między łączeniami nie może być mniejsza niż 100 mm (ilustracja 8).

Preview
© Snap-on Equipment and DiagnosticsJeśli te wytyczne nie zostaną spełnione, to efektem będzie przesuwanie się wzajemne sygnałów „High” i „Low”, co spowoduje trudności w komunikacji. Przesunięcie sygnałów szyny „High” i „Low” zaprezentowane jest na ilustracji 11.


Preview
© Snap-on Equipment and DiagnosticsW przypadku sieci optycznej MOST należy pamiętać o minimalnych promieniach zagięcia przewodów optycznych. Jeśli przewód zostanie załamany (promień mniejszy niż 25 mm), to jest więcej niż pewne, że do odbiornika nie dotrze sygnał optyczny, ponieważ przewód ulegnie uszkodzeniu.
Reasumując, do skutecznego diagnozowania i naprawy współczesnych samochodów nie wystarczy posiadać multimetr czy tester diagnostyczny, należy również zaopatrzyć się w oscyloskop i umieć się nim posługiwać, gdyż coraz więcej usterek jest związanych z układami elektrycznymi i elektronicznymi, błędami komunikacji czy konfiguracji sterowników. Powoli zawód mechanika odchodzi w zapomnienie, a za kilka lat samochody będą naprawiać elektronicy, czy wręcz informatycy. Niech dowodem na to będzie fakt, że już obecnie większość akcji serwisowych prowadzonych przez producentów samochodów polega nie na wymianie wadliwej części, a na wgraniu nowej wersji oprogramowania do sterownika.
Bus Systems
CAN, CAN FD, FlexRay, Ethernet, K-Line, LIN and MOST in use
In addition to access to the vehicle via the diagnostic connector (CAN or K-Line), defined by the legislator, other bus systems have also established themselves as standards in the vehicle. These always focus on special requirements, ranging from inexpensive implementation (e.g. LIN) through high bandwidth (Ethernet) to possible use in security-relevant distributed closed-loop control (FlexRay).
CAN ISO 11898

The CAN bus (Controller Area Network) was introduced to enable the networking of a large number of ECUs. It permits high data rates in diagnostics and flash programming.
CAN FD ISO 11898-1

CAN with flexible data rate (CAN FD) overcomes the limitations of the classical CAN bus in terms of data transfer rate. In practice the data throughput of CAN FD is six times higher than classical CAN, depending on the network topology.
LIN

LIN bus (Local Interconnected Network) enables the inexpensive integration of sensors and actuators in vehicle networks. It creates small subnets.
FlexRay

FlexRay was invented at the beginning of this century to be able to implement an appropriate bus system for security-critical applications. It enables deterministic time responses and is designed to be redundant.
MOST

MOST (Media Oriented System Transport) was introduced at the beginning of this century to simplify the integration of infotainment ECUs into the vehicle thanks to its special communication mechanisms and high data rates.
K-Line ISO 9141

In the 1990s, the K-Line was one of the first ways of accessing ECUs in completed vehicles. This is why it was stipulated in the first OBD standards and has been in use ever since. Today, it is being replaced in new projects by CAN.
SAE J1850

The launch of OBD led to standardized access of vehicle networks – something enabled in the US with the help of the J1850 standard.
Ethernet

With Ethernet, a standard that has been used successfully for years now in networking is currently being introduced to automotive electronics. In addition to inexpensive components, a major advantage is the extremely high bandwidth.
