



Diagnostikk av Line K, Lin, CAN, TTCAN, FlexRay, TTP, Bluetooth og DE FLESTE nettverk
Diagnostisere biler - CAN-nettverk

Snap-on Equipment and Diagnostics
Teknikken og teknologien som brukes i biler endrer seg veldig raskt, og dermed – verktøyene som brukes av biltjenester må også endres. Det er også nødvendig å stadig utvide kunnskapen om mekanikk. I eldre biler var mesteparten av reparasjonene mekaniske reparasjoner, mens i dag er de fleste problemene verksteder står overfor elektriske eller til og med elektroniske feil.
Før i tiden var det ingen sjåfører, bilene hadde forgassere eller mekaniske pumper. Senere dukket elektronisk kontroll av motordrift, bremsesystem, etc. opp, deretter en spesialisering - bilelektronikk. Utviklingen av teknologi, utseendet til hybrid- eller elbiler tvinger også frem en endring i tilnærmingen til bilreparasjon.
Det er ikke et spørsmål om fremtiden, biler har hatt sjåfører og et informasjonsnettverk som forbinder dem i årevis. Den første bilen som ble utstyrt med databuss mellom kontrollerene var BMW 8 fra 1988, mens den første bilen med CAN-nettverk var 1991 Mercedes S, det vil si biler fra snart 30 år siden. Foreløpig er det flere titalls kontrollere i biler som kommuniserer med hverandre og bruker signaler fra de samme sensorene. For å gjøre dette mulig og for å redusere antall elektriske ledninger ble det benyttet et CAN-nettverk, som kan komme i flere varianter: oftest er det et par flertrådet ledninger, men det kan også være en enkelt ledning eller - i nyere løsninger - den MEST fiberoptiske kabelen.

© Snap-on Equipment and Diagnostics
CAN-signalet er vist i figur 1. Siden dette er et digitalt signal, sendes kun to tilstander: "0" og "1". Figur 2 viser hvordan sjåføren skiller den. Som et resultat påvirker ikke interferens i form av spenningstopper den overførte informasjonen, fordi ECU-en "ser" på 2V-forskjellen mellom signalene. Dette er forklart i figur 3.

© Snap-on Equipment and Diagnostics
Drivere krever ulike dataoverføringshastigheter, derfor brukes flere nettverkskategorier med ulike frekvenser og ulike prioriteringer. Et eksempeldiagram av CAN-nettverket er vist i figur 4.
Det brukes nettverk med ulike datahastigheter i bilen. For at de skal fungere sammen, brukes drivere til å koble til disse nettverkene, kalt gatewayer.
La oss nå se på nettstedets implikasjoner for diagnostisering av problemer:
feilaktig signal fra en sensor kan forårsake feilfunksjon i flere forskjellige systemer,
feilkoden for en gitt komponent kan være skrevet av kontrolleren til et annet system,
nettverksfeil kan gjøre det umulig å diagnostisere gitte systemer ved hjelp av diagnostiske testere,
de aktuelle systemene kan fortsette å fungere til tross for brutt kommunikasjon gjennom nettverket.
Bygge og diagnostisere nettverk
Nettverket i endene er beskyttet av 2 motstander med en motstand på 120 ohm. De beskytter mot signalsprett og deres forstyrrelser. Diagrammet over CAN-nettverket og tilkoblingene til det for individuelle mottakere er vist i fig. 5.
annonse
Den grunnleggende kontrollen kan utføres ved å koble til diagnosekontakten med et multimeter (pinnene som er ansvarlige for CAN-nettverket er vanligvis pinner 6 og 14). Med tenningen av skal motstanden være 60 Ω. Husk å foreta målingen med avslått tenning, når regulatorene ikke sender signal!
Mulig skade på CAN-nettverket og deres diagnose
Ved kortslutning i nettverket er det ingen kommunikasjon, men de enkelte kontrollerene kan fungere som de skal. Motstanden målt med et multimeter vil være 0 Ω. Ved nettverksavbrudd (kabelbrudd) kan individuelle kontrollere fungere, mens en kommunikasjonsfeil vil lagres i feilminnet. Motstanden som måles vil være 120 Ω. Ved brudd mellom kontrolleren og nettverket vil ikke den gitte kontrolleren fungere, mens de andre vil. Den målte motstanden vil være 60 Ω og feilkoden som leses vil indikere at kontrolleren har kommunikasjonsproblemer.
For å sjekke signalet som sendes via nettverket, trenger vi allerede et oscilloskop, fordi dataoverføringshastigheten, og dermed signalfrekvensen, er veldig høy:
KAN opptil 1 Mbit/s,
Flexray opp til 10 Mbit/s,
MEST Fiberoptisk opp til 150 Mbit/s.
Figur 9 viser et eksempel på et feil CAN-signal, i dette tilfellet er CAN Low-linjen kortsluttet til jord.
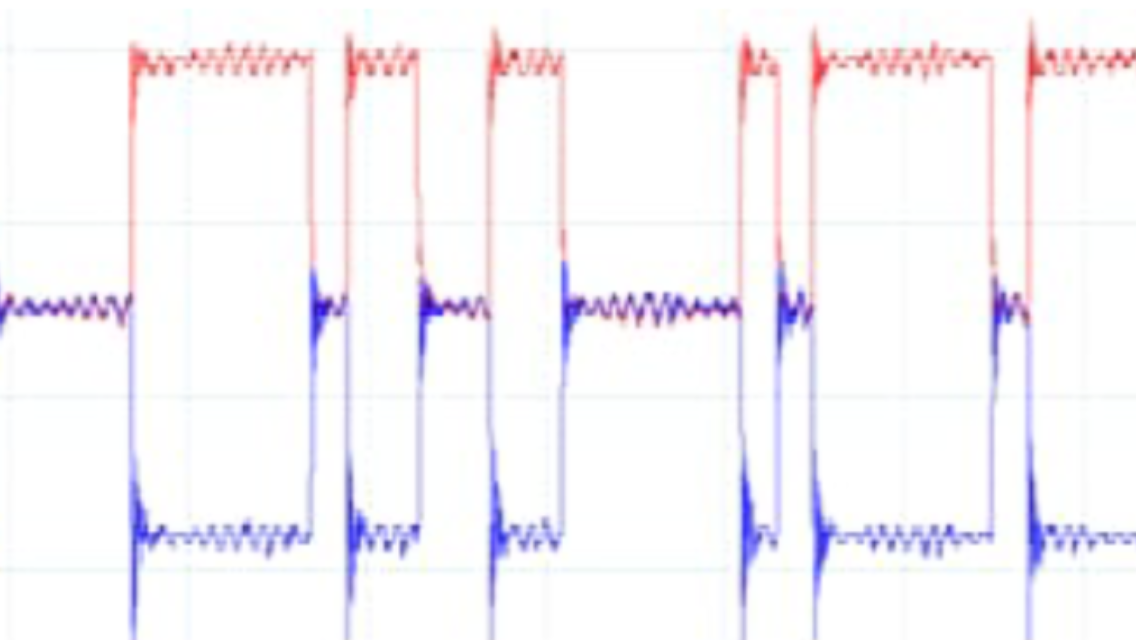
Etter hvert som individuelle sjåfører kommuniserer i nettverket, oppsto problemet med riktig konfigurasjon slik at de kunne overføre informasjon mellom seg selv. Det var også et problem med å koble ekstra tilbehør til bilen, for eksempel en uoriginal radio, tåkelykter eller en tilhengerkrok. Figur 10 viser et eksempel på en nettverksbølgeform der drivere ikke er riktig konfigurert.
Spørsmålet om selve ledningene
Du bør også være oppmerksom på tilstanden til CAN-buskablene. Når du reparerer CAN-kabler, følg følgende retningslinjer:
det tvunnede paret kan rettes til en maksimal lengde på 50 mm,
avstanden mellom skjøter må ikke være mindre enn 100 mm (fig. 8).

Preview
© Snap-on Equipment and DiagnosticsHvis disse retningslinjene ikke følges, vil resultatet være at "Høy" og "Lav"-signaler skifter i forhold til hverandre, noe som forårsaker kommunikasjonsvansker. Forskyvningen av "Høy" og "Lav" busssignaler er vist i figur 11.


Preview
© Snap-on Equipment and DiagnosticsNår det gjelder MOST optiske nettverk, må man huske på minimums bøyeradiene til de optiske kablene. Hvis kabelen er bøyd (radius mindre enn 25 mm), er det mer enn sikkert at det optiske signalet ikke når mottakeren da kabelen blir skadet.
For å oppsummere, for effektivt å diagnostisere og reparere moderne biler, er det ikke nok å ha et multimeter eller diagnostisk tester, du bør også ha et oscilloskop og kunne bruke det, fordi flere og flere feil er relatert til elektriske og elektroniske systemer, kommunikasjonsfeil eller konfigurasjonsfeil for drivere. Mekanikeryrket går sakte over i glemselen, og om noen år skal bilene repareres av elektronikkingeniører, eller til og med IT-spesialister. La beviset på dette være det faktum at allerede de fleste servicehandlinger utført av bilprodusenter ikke består i å erstatte den defekte delen, men i å laste opp en ny versjon av programvaren til kontrolleren.
Bus Systems
CAN, CAN FD, FlexRay, Ethernet, K-Line, LIN and MOST in use
In addition to access to the vehicle via the diagnostic connector (CAN or K-Line), defined by the legislator, other bus systems have also established themselves as standards in the vehicle. These always focus on special requirements, ranging from inexpensive implementation (e.g. LIN) through high bandwidth (Ethernet) to possible use in security-relevant distributed closed-loop control (FlexRay).
CAN ISO 11898

The CAN bus (Controller Area Network) was introduced to enable the networking of a large number of ECUs. It permits high data rates in diagnostics and flash programming.
CAN FD ISO 11898-1

CAN with flexible data rate (CAN FD) overcomes the limitations of the classical CAN bus in terms of data transfer rate. In practice the data throughput of CAN FD is six times higher than classical CAN, depending on the network topology.
LIN

LIN bus (Local Interconnected Network) enables the inexpensive integration of sensors and actuators in vehicle networks. It creates small subnets.
FlexRay

FlexRay was invented at the beginning of this century to be able to implement an appropriate bus system for security-critical applications. It enables deterministic time responses and is designed to be redundant.
MOST

MOST (Media Oriented System Transport) was introduced at the beginning of this century to simplify the integration of infotainment ECUs into the vehicle thanks to its special communication mechanisms and high data rates.
K-Line ISO 9141

In the 1990s, the K-Line was one of the first ways of accessing ECUs in completed vehicles. This is why it was stipulated in the first OBD standards and has been in use ever since. Today, it is being replaced in new projects by CAN.
SAE J1850

The launch of OBD led to standardized access of vehicle networks – something enabled in the US with the help of the J1850 standard.
Ethernet

With Ethernet, a standard that has been used successfully for years now in networking is currently being introduced to automotive electronics. In addition to inexpensive components, a major advantage is the extremely high bandwidth.
